Virtual Reality(VR) Research
Real-World Oriented Embodiment Programming
It is thought that if software components have the same 3D visual shape and same behavior as the corresponding object, which actually exists in the real world, programming becomes possible by combining those software components in the same way as if we made something in the real world. In this way, to introduce metaphor of real-world objects into programming makes it possible to increase the software development efficiency. Especially, this study aims to provide such programming environments in which the user can build various 3D application software by his/her body action same as done in the real world.
Development of VR applications supporting Haptic (Phantom omni) devices (Katsunori Miyahara, et al.)
Cloth design system (left image) and Surgical training system (right image)
Demo movie: Cut&Sew operations
Demo movie: Collaborative operations
Demo movie: Surgical training system
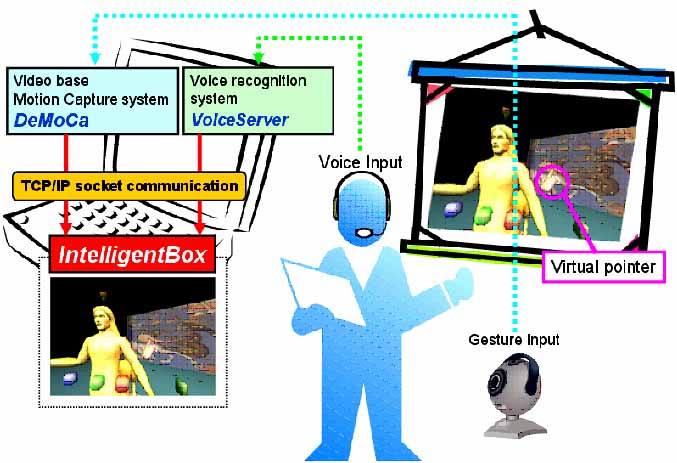
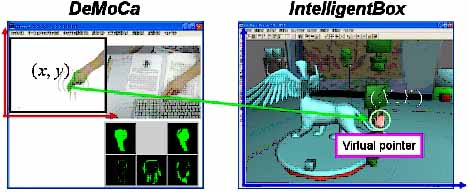
DeMoCa: Video-based motion tracking system (Yoshiaki Akazawa, et al.)
We have developed a video-based motion tracking system called "DeMoCa" to provide intuitive operations for various 3D graphics applications.

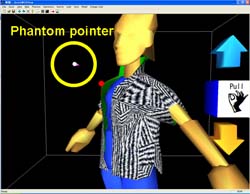
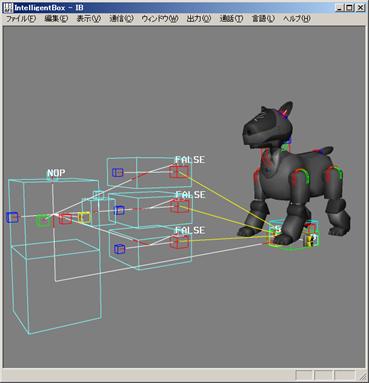
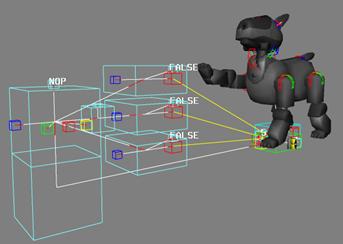
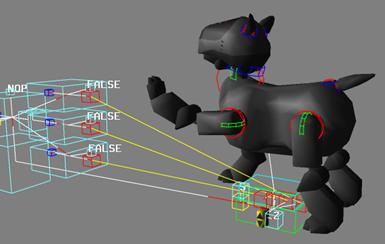
Voice Input Interface (Hiromichi Fukutake, et al.)
We have been studying voice input interface to enable intuitive operations for various 3D graphics applications.
The followings are images of interactive application example in which the user interacts with a CG dog by the voice communication.
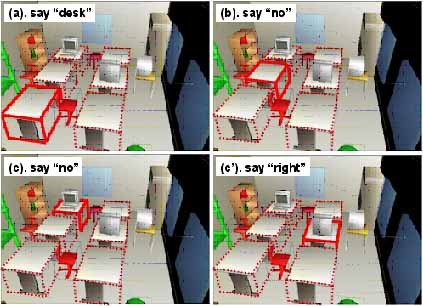
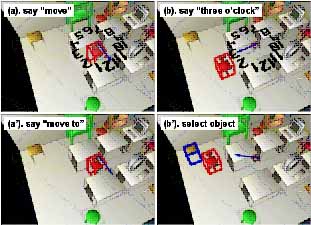
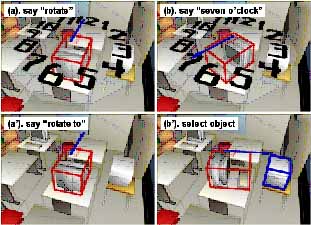
3D Object Layout and Composition by Voice Commands Based on Contact Constraints
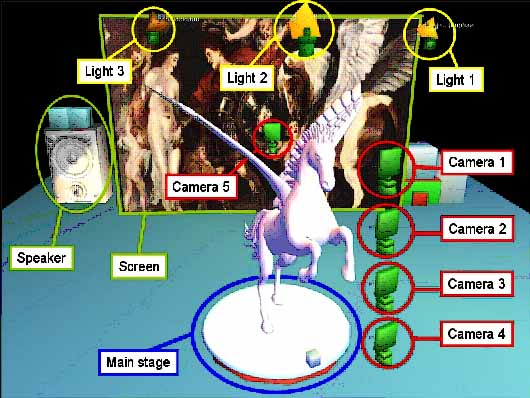
Voice and Gesture Based 3D Multimedia Presentation Tool